

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-15
Mutlak fotoelektrik şaft kodlayıcısının bus arayüzü olabilir
1 Giriş Mutlak fotoelektrik şaft açısı kodlayıcı, dönen şaftın açısal konumunu ve açısal hızını gerçek zamanlı olarak ölçen bir dijital açı ölçüm cihazıdır. Şaft açısı bilgilerini dijital kodlara dereceler, dakika ve saniye şeklinde dönüştürür ve veri yolu bağlantısı gerçek zamanlı ölçüm gerçekleştirebilir. Yüksek çalışma güvenilirliği, güçlü anti-müdahale kabiliyeti, yüksek hassasiyet, güçlendirme belleği vb. Çekim menzili ekipmanı, dijital teodolit, radar ve bazı büyük askeri ekipmanlar gibi dijital ölçüm izleme ve konumlandırma sistemlerinde yaygın olarak kullanılmaktadır.
Bu pratik uygulama kontrol sistemlerinde, her bir alt sistemin sensörlerinin ve dedektörlerinin farklı veri yapılarından dolayı, mutlak fotoelektrik şaft kodlayıcısı, esas olarak RS232, RS485 / 488 seri bağlantı noktaları, paralel bağlantı noktaları vb. . Bununla birlikte, belirli mühendislik uygulamalarında, yukarıdaki iletişim yöntemleri genellikle iletim mesafesi ve iletişim oranı ile sınırlıdır. Son yıllarda, seri iletişim hızla gelişti ve çeşitli kontrol sistemi saha otobüs formları ortaya çıktı. Can otobüsü en yaygın kullanılanlardan biridir. Kontrolör Yerel Alan Ağ Otobüsünün kısaltmasıdır ve dağıtılmış kontrol ve gerçek zamanlı kontrol için etkili bir destektir. Seri iletişim ağı. Yüksek performans, yüksek güvenilirlik ve benzersiz CAN otobüsünün tasarımı nedeniyle, yurtiçinde ve yurtdışında en popüler ve gerçek zamanlı saha otobüsü haline gelmiştir. Kontrol sistemindeki dahili iletişim yöntemlerinin geliştirilmesi ve değişiklikleri, kodlayıcıyı açısal yer değiştirmeyi ve açısal hızı ölçmek için kullanılan tüm kontrol sisteminin FieldBus tasarım gereksinimlerini karşılamak için bir CAN veri yolu arayüzü sağlar.
2 Kodlayıcı Çalışma İlkesi ve Veri İletimi
2.1 Çalışma İlkesi Kodlayıcı iki bölümden oluşur: bir veri toplama cihazı ve bir veri işleme cihazı. Yapısal blok diyagramı 1'de gösterilmiştir. Tek çip mikrobilgisayar, kodlayıcı devre sisteminin temel kısmıdır. Enkoder sinyallerini (kaba kod, orta ince kod, ince kod) topladıktan sonra, ince kod, kod kanalı düzeltmesi, dijital ekleme, elektrik sıfır ayarlaması, derece, dakika ve ikinci dönüşüm gibi yazılım işleme ve son olarak ekran ve son olarak ekran ve son olarak bölümlere ayrılır. Kontrol sistemi ile arayüzü gerçekleştirin.
2.2 Veri İletimi Enkoder ve kontrol sistemi arasındaki veri iletimi hem paralel hem de seri modlarda kullanılabilir. Paralel iletim verileri paralel bağlantı noktası üzerinden iletir. Her veri veri kablosunun bir çekirdeğini gerektirir. Örneğin, 24 bit bir kodlayıcı için 24 çekirdekli bir kablo gereklidir. Bu nedenle, kullanım alanı sınırlıdır ve sadece kısa mesafeli iletim ve özel gereksinimler için uygundur. vesilesiyle. Seri şanzımanda, veri bilgileri bükülmüş bir çift aracılığıyla seri olarak iletilir ve hata düzeltmesi gibi işlevleri uygulamak için farklı iletişim protokollerine göre ek bitler eklenir. Bu işlev veri veri yolu sistemlerine genişletilebilir. Seri şanzıman daha az kablo, daha az donanım, düşük maliyet, uzun iletim mesafesi ve güvenli ve güvenilir verilere sahiptir.

2.3 Önerilen Enkoder Bus Arabirimi Çeşitli alan veri yollarının kapsamlı karşılaştırılmasında, CAN veri yoluna dayalı iletişim sistemi birçok mükemmel özelliğe sahiptir: veri sinyali diferansiyel voltajla iletilir; Yolu iletim ortamı bükülmüş çift, koaksiyel kablo ve optik fiber kullanabilir; Çoklu Master modunda, esnek iletişim modunda çalışabilir; Noktadan noktaya, noktadan çok noktaya ve küresel yayın moduna veri aktarabilir ve alabilir; Ağdaki düğüm bilgileri, farklı gerçek zamanlı gereksinimleri karşılamak için farklı önceliklere ayrılabilir; tahribatsız otobüs tahkim teknolojisi; Veriler kısa çerçeve yapısını benimser, her kare 8byte ve veri hata oranı düşüktür; İletişim Protokolü'ndeki Veri Bağlantısı katmanının MAC alt katmanının katı hata algılama özellikleri vardır; Uluslararası standartlara ve iyi bir açıklığa sahiptir. Bu nedenle, fotoelektrik izleme sisteminin dahili iletişim modunun dönüştürülmesinde, CAN veri yolu veri iletişim veri yolu yapısı olarak kullanılır ve daha sonra kodlayıcı CAN arabirimi önerilir.
3 Enkoder CAN CAN BURUS ARAYÜSÜ FOTOOĞRAFI İZLEME SİSTEMİ
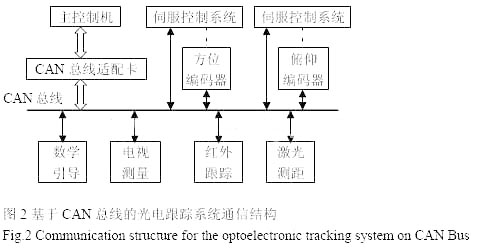
3.1 Kodlayıcı, fotoelektrik izleme sisteminin konum tespiti için kullanılır. Mutlak fotoelektrik eksen kodlayıcı, fotoelektrik izleme sistemindeki fotoelektrik izleme sisteminin azimut ve eğim açısını ölçmek için bir sensördür. Fotoelektrik izleme sisteminin dahili veri yolu yapısı, CAN veri yolu iletişim yöntemine dönüştürülür. CAN BUS arabirimi, esnek arayüz ve hat tasarrufu özelliklerine sahiptir. Aynı zamanda, bir mikroişlemciye sahiptir ve akıllı kontrol elde etmek için uzaktan çerçeveleri doğrudan diğer cihazlara göndermek için sistemde akıllı bir düğüm olarak kullanılabilir. Şekil 2, CAN BUS'a dayalı fotoelektrik izleme sisteminin bir iletişim yapısı diyagramıdır. Fotoelektrik izleme sistemi, çoklu iletişim yöntemlerinin paralel yapısı yerine CAN veriyolunun tek bir seri veri yolu yapısını kullanır. İki fotoelektrik kodlayıcı tarafından ölçülen azimut ve eğim açıları, ana kontrol makinesine veri yolu aracılığıyla gönderilir ve ana kontrol makinesi verileri buna göre işler. Bus Control Servo kontrol sistemi aracılığıyla, tüm alt sistemler, sistem kablolarını basitleştiren, genel sistem veri yolu kullanımını, gerçek zamanlı veri iletimini ve bit hatasını geliştiren bir çift bükülmüş çiftle birbirine bağlanabilir. Oran büyük ölçüde azalır.
3.2 Kodlayıcı Düğümü Can Can Vurum Arabirimi Donanım Kompozisyonu
CAN veri yolu arayüzü esas olarak tek çipli mikrobilgisayar, CAN CONTROLER, CAN BUS sürücüsü ve fotoelektrik izolasyon donanımından oluşur. CAN BUS iletişim arayüzünün spesifik devresi Şekil 3'te gösterilmektedir.
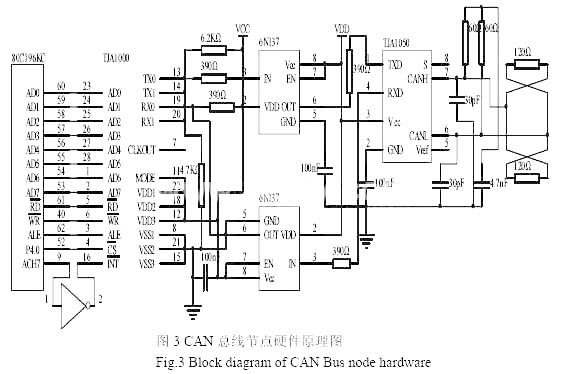
Tek çipli bilgisayar, karmaşık gerçek zamanlı kontrol durumları için daha uygun olan 16 bit gömülü bir mikrodenetleyici olan Intel80C196KC'yi seçer. Kodlayıcının veri işlenmesinden ve CAN veri yolu düğümünün başlatılmasından da sorumludur. CAN denetleyicisi, veri yolu ve ana bilgisayar (kontrol bilgisayarı) arasındaki veri iletişimi arayüzünü gerçekleştirmek için Philips Semiconductor'ın SJA1000'i seçer, CAN2.0A ve CAN2.0B protokollerini destekler, genişletilmiş 64 bayt alıcı bir tampona sahiptir. -out (FIFO) prensibi, 11 bit ve 29 bit tanımlama kodlarını destekler, 1Mbps'ye kadar iletişim bit hızı, BasicCan modunda ve Pelican modunda çalışabilir. CAN BUS sürücüsü, CAN denetleyicisi ve fiziksel veri yolu arasındaki arayüzü sağlayan yüksek hızlı bir CAN otobüs sürücüsü olan Philips TJA1050'yi seçer, CAN veriyolunun diferansiyel iletim ve alım işlevlerini gerçekleştirir ve geniş bir ortak mod aralığına sahiptir. Güçlü elektromanyetik girişim farkı alma kapasitesi altında, giriş seviyesi 3.3V aygıtlarla uyumludur ve güçsüz düğümler veri yoluna müdahale etmez. TJA1050'ye katılmak yüksek hızlı veri iletişimi sağlayabilir. Güvenlik ve gelişmiş anti-jamming yeteneği için, TJA1050 iyi simetrik performans özelliklerinin kullanımı ayrı terminaller kullanın. 30pf'lik iki küçük kapasitör, CanH ve Canl ve toprak arasında paralel olarak bağlanır, bu da veriyol üzerindeki yüksek frekans parazitini ve elektromanyetik radyasyonu önleme yeteneğini filtreleyebilir. Sistemin anti-etkileşim yeteneğini daha da iyileştirmek için, CAN denetleyicisi SJA1000 ve CAN sürücüsü TJA1050 arasında galvanik izolasyon elde etmek için bir izolasyon devresi oluşturmak üzere yüksek hızlı bir optokuplör 6N137 kullanılır. 6N137'nin her iki tarafındaki güç kaynağı VCC ve VDD tamamen izole edilir, bu da devreyi aynı anda önleyebilir, iki 120Ω veri yolu empedans eşleştirme dirençleri, veri yolu her iki ucuna bağlanmalıdır.
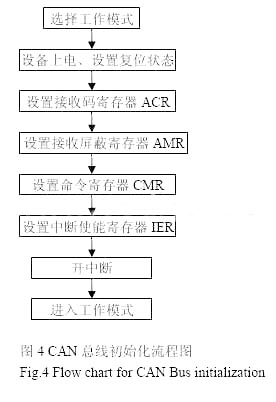
3.3 Düğüm Yazılım Tasarımı Mutlak fotoelektrik eksen kodlayıcının açısı bilgileri (derece, dakikalar ve saniyeler) CAN denetleyicisinden CAN veri yoluna veya CAN veri yoluna SJA1000 veri yolu denetleyicisi tarafından otomatik olarak arabelleğe alınır. CAN BUS Arabirimi İletişim Programı, alt program göndererek ve alt program alarak başlatma alt programından oluşur. Önce gerçek sistemin ihtiyaçlarına göre CAN veriyolu çalışma modunu seçin. Burada, Pelican modu, 12MHz kristal osilatörünü seçin, veri yolu veri iletim hızı 500kbits / s olarak ayarlanmıştır, her veri yolu düğümü normal iletişimi sağlamak için aynı veri iletim hızını ayarlamalıdır. SJA1000 ve MCU arasındaki fiziksel bağlantının güvenilir olduğunu belirleyin ve ardından SJA1000 denetleyicisini başlatın. SJA1000 Sıfırlama Modunda, her sicilin başlangıç durumunu ayarlayın. Başlatma akış şeması Şekil 4'te gösterilmektedir. Verilerin iletimi ve alımı gönderilen alt rutin ve alıcı alt rutin ile gerçekleştirilir. Mesaj kimliği düğüm verilerinin akışını belirler. Veri gönderirken, Mesaj Kimliği alımı bayrağı biti segmentinin ayar ilkesi: Bit alınması gereken düğümün karşılık gelen kimliği 0 ve kalan bitler 1'dir. Veri alırken tam tersidir. Kendisine gönderilen bilgiler olup olmadığı kimliğe göre değerlendirilir. Alınır, filtrelenmez.
4. Sonuç
Saha düzeyindeki bir iletişim otobüsü olarak Can Bus, yüksek güvenilirlik ve maliyet performansına sahiptir. CAN veri yolu arayüzüne sahip mutlak fotoelektrik şaft kodlayıcı, kontrol sistemlerinde kullanım için daha esnek hale getirir.
Bu makale yenilikçi: Encoder'ın CAN VERİYOR Arayüzü ve fotoelektrik izleme sistemindeki uygulaması
Paylaştığınız için:
Talep Gönder

Ms. carol Dong
böyle:86-431-85543703
Fax:86-431---88634119
Hareket eden telefon:+8613894866263
E-posta:sales@encoders.com.cn
Adres:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobil site
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.